
Ebü’l-İz El Cezeri ve Sibernetik-Otomatik Kontrol Bilimi ile Robot Teknolojisi
Sibernetik ilmi, insani müdahaleye gerek duymadan dış dünyanın ihtiyaç ve dalgalanmalarına göre kendi kendini düzenleyebilen sistemleri inceleyen bilim dalıdır. Bu bilim dalı, canlı cansız tüm karmaşık sistemlerin denetlenmesi ve yönetilmesini inceler. Sistemlerdeki haberleşme, denge kurma ve ayarlama üzerine yoğunlaşır. Bu alanda işleyen prensipleri belirleyerek teknolojide kullanılmasını sağlar. Bu bilim dalı sayesinde sistemlerin birbirleriyle iletişim kurmaları ve birbirlerini denetleme imkanı oluşur. Sibernetik biliminin gelişim süreci içerisinde robotik, genetik ve yapay zeka gibi yeni birçok disiplinin doğduğu söylenebilir.
Doğada, işleyen bir süreç olarak sibernetik, aslında uzun süredir varlığını sürdürmektedir. Sibernetik bir bilim dalı olmaktan fazlasıdır. İnsan hayatında gerçekleşen birçok olay ve durum hakkında geribildirim sağladığından sibernetik aynı zamanda bir bakış açısı kabul edilir. Sibernetik birçok bilim ile entegre olabildiği için özellikle günümüzde en önemli bilimler arasında yerini almaktadır.
Sibernetik ilminin Tarihsel Gelişimi
Savunma sanayi ve savaşlar, birçok teknolojinin gelişmesinde olduğu gibi sibernetik sistemlerin gelişmesinde de büyük paya sahiptir. Özellikle İkinci Dünya Savaşı sırasında radarlar, ağır silahlar gibi araçlarda oluşan ototakip ihtiyacı; sibernetik biliminin yükselişinde çok etkili olduğu kabul edilmektedir. Her ne kadar sibernetik temeli için çeşitli milletler kendi öncülerini savunsa da dünyanın ilk mühendisi kabul edilen Türk bilim adamı Ebü’l-İz El Cezeri’nin oluşturduğu otomasyon-güdümlü alet ve makinalar, sibernetik ilminin temelini teşkil etmektedir. Kim ne derse desin, El Cezeri; bundan yaklaşık 8 asır önce Otomatik Kontrol Bilimi’ni kurmuş ve sistemler arası denge sağlamayı başarmıştır.
El Cezeri; eserleri ve icad ettiği makinalarından dolayı, Avrupa da; matris ustası, fizikçi ve matematikçi olarak bilinmektedir. Yazmış olduğu “Mekanik Hareketlerden Mühendislikte Faydalanmayı Sağlayan Kitap” adlı eseri bugünkü sibernetik ve robot bilimlerine temel olacak bilgileri ihtiva etmektedir. Kitapta resimli olarak açıkladığı otomatik çalışan makineler günümüz mekanik ve sibernetik bilimlerinin temel taşlarını oluşturmaktadır. Bu bilimin temellerini El Cezeri atsa da sibernetik terimini ilk kez Andre Ampere adlı Fransız matematikçi ve fizikçi kullanmıştır. Sibernetiği güncel anlamda manasına kavuşturan kişi ise 20.Asır bilim adamlarından Amerikalı felsefeci ve matematikçi Norbert Wiener olmuştur.
Sibernetik ve robotiğin ilk mucidi olarak kabul edilen Cizre doğumlu Bedî’ûz-Zamân Ebû’l-‘İzz İsma’il bin er- Rezzâz El-Cezerî’nin sıra dışı hayatı bu ismin önemli mesajlar taşıdığını göstermektedir.
Ebû’l İz’in hayatı
Sibernetik ve robotik biliminin babası olarak kabul edilen, batı dünyasında El-Cezerî olarak bilinen, zamanın dahisi olarak anılan Ebû’l İz İsmail İbni Rezzaz El Cezerî, Dicle ile Fırat arasında yer alan ve ada anlamına gelen Cezire’de (bugünkü adı ile Cizre) 1136 yılında dünyaya gelir. Öğrenimini Kürt Medresesi Camia’da tamamlayan İsmail, burada fizik ve sibernetik alanlarında yoğunlaştı ve halen kullanılmakta olan ve aşılmamış onlarca buluşa imza attı. Kürt Zengilerin hâkimiyeti altında yaşayan Ebul İz, bir süre sonra Artukoğulları’nın daveti üzerine Diyarbakır’da yaşadı.
Cezeri’nin Türk, Kürt veya Arap olduğuna dair tartışmalar ideolojik bagajlarla yapılmaktadır. Cezeri’ye dair kesin olarak bilinen Türkçe, Kürtçe ve Arapça’yı iyi derecede bildiğidir.
El Cezerî, El-Cami Beyne’l-İlm Ve’l-Amel En-Nafi ‘s Sınaa’ti’l Hiyel (Makine Yapımında Yararlı Bilgiler ve Uygulamalar) adlı eserinde robot ve akışkanlar mekaniği konularında pratik mühendisliğin öncüsü olarak, sibernetik ve mekaniği ilk kez bir arada kullanıp doruk noktasına ulaştırmıştır. Hakkında birçok yazılar yazılsa da, hayatına ilişkin olarak kitabının girişinde söylediklerinin dışında başka bilgi bulunmamaktadır. Kitabında belirtildiğine göre, 1181’de başlamak üzere 25 yıl, Diyarbekir Sultanı Artuk Salîh Nâsirüddîn Ebu’l Feth Mahmûd’un, daha önce de babasının ve kardeşinin hizmetinde bulunmuştur. Eserinin giriş bölümünde bu kitabı kaleme alış nedenini şöyle anlatır: “Bir gün Sultan’ın huzurundaydım ve yapmamı emrettiği şeyi getirmiştim… Ne düşündüğümü sezdi ve gizlediğimi açığa vurdu ve bana şöyle dedi: “Eşsiz araçlar yapmış, onları gücünle işler duruma getirmişsin. Seni yoran ve kusursuz biçimde inşa ettiğin bu şeyler kaybolup gitmesin. Benim için icat ettiğin bu araçları bir araya toplayan ve her birinden ve resimlerinden seçmeleri kapsayan bir kitap yazmanı istiyorum.” Onun bana sunduğu modeli uyguladım ve önerilerini kabul ettim, zaten boyun eğmekten başka yapacağım bir şey yoktu. Gerekli çalışmayı yapmak üzere gücümü topladım ve bu kitabı kaleme aldım.” Kitabındaki tüm şekilleri kendisi çizmiş ve renklendirmiştir. Bu da El-Cezerî’nin yalnız mühendis değil, yetenekli bir sanatçı olduğunu da göstermektedir. Kitabında yer alan çizimlerinde insan ve hayvan figürlerinden geniş ölçüde yararlanmıştır. Müslümanlık inancında insan ve hayvan figürleri resim ve heykelde tasvir edilmesi yasaklandığı için, bu figürleri soyutlayarak ve gerçek boyutlarından bir miktar saparak kullanma yoluna gitmiştir. Kitabın orijinali, günümüzde mevcut değildir. Fakat 5 kopya Türkiye’de Topkapı ve Süleymaniye kütüphanelerinde bulunmak üzere bütün dünyada bilinen 15 kopyası vardır. Eser, zamanın ilim dili olan Arapça ile kaleme alınmıştır. T.C Kültür Bakanlığı tarafından 1990 yılında “Olağanüstü Mekanik Araçların Bilgisi Hakkında Kitap” adıyla Türkçeye tercüme edilmiş bulumaktadır.

50’den fazla cihazın kullanım esaslarını, yararlanma olanaklarını çizimlerle gösterdiği bu kitapta Cezeri, tatbikata çevrilmeyen her teknik ilmin, doğru ile yanlış arasında kalacağını söyler. El-Cezerî’nin bu eseri 6 bölümden oluşur. Birinci bölümde binkam (su saati) ile finkanların (kandilli su saati) saat-ı müsteviye ve saat-ı zamaniye olarak nasıl yapılacağı hakkında on şekil; ikinci bölümde çeşitli kap kacakların yapılışı hakkında on şekil, üçüncü bölümde hacamat ve abdestle ilgili ibrik ve tasların yapılması hakkında on şekil; dördüncü bölümde havuzlar ve fıskiyeler ile müzik otomatları hakkında on şekil; beşinci bölümde çok derin olmayan bir kuyudan veya akan bir nehirden suyu yükselten aletler hakkında 5 şekil; 6. bölümde birbirine benzemeyen muhtelif şekillerin yapılışı hakkında 5 şekil yer alır.
Cezeri, eserde yalnızca icat ettiği aletlerin ayrıntılı bilgisinden bahsetmez; aynı zamanda izlediği metodolojiyi de kaleme alarak kendisinden sonra bu alanda çalışacak olanlara da yol göstermektedir. Cezeri, icatları konusunda izlediği metodu kısaca şöyle belirtmekte: “öncekilerin dağınık bıraktıklarını topladım; incelemiş olduklarını bir yöntem dâhilinde bölümlere ayırdım; takip edilmesi kolay, başlangıcı ve bitişi karmaşık olmayan teknikler icat ettim.”
Cezeri, otomatik kontrollü makinelerin ilki sayılan Jacquard’ın otomatik dokuma tezgâhından 600 yıl önce değişik haznelerdeki suyun seviyesine göre ne zaman su dökeceğine, ne zaman meyve ve içecek sunacağına karar veren otomatik hizmetçiyi geliştirdi.

Bazı makinelerinde hidro mekanik etkilerle denge kurma ve harekette bulunma sistemine yönelen Cezeri, bazılarında ise şamandıra ve palangalar arasında dişli çarklar kullanarak karşılıklı etkileme sistemini kurmaya çalıştı. Kendiliğinden çalışan otomatik sistemlerden sonra su gücü ve basınç etkisinden yararlanarak kendi kendine denge kuran ve ayarlama yapan dengeyi oluşturması, Cezeri’nin otomasyon konusundaki en önemli katkısıdır.
Cizre’den çıkarak Diyarbakır (Amed) Artuklu Sarayı’na gelen Cezeri, “El-Câmi’ Beyne’l- ‘İlmVe’l-Amel En-Nâfi’ Fi Es-Sınaâ’ti’ül-Hiyel” isimli eseriyle sibernetik biliminin resmen kurucusu oluyordu.
Cezeri’nin yetiştiği çağ, İslam biliminin altın dönemiydi. örneğin Farabi, “Risale-i Ebi Nasr el-Farabi fi’l-Hala” isimli eserinde hava ve su üzerine çalışıyor ve önemli keşifler ortaya koyuyordu.
Farabi, henüz 11’nci yüzyılda “doğanın boşluktan sakındığı” tezini ortaya atarak Aristotales bilimine olan imani güveni yerle yeksan ediyordu.
Çağdaşları Fahreddin Râzî fizikte, İbn Rüşd tıpta, Şerafeddin el-Tusî matematikte, Nasîrüddin Tûsî astronomide çığır açıyordu.
El-Cezerî, 1206 yılında Cizre’de ölür, mezarı Cizre’deki Nuh Peygamber Camisi’nin avlusunda bulunmaktadır. El-Cezerî, çalışmalarının ileride kendisinden sonra gelenler tarafından önemsenmeme ihtimaline karşı kitabının önsözünde şöyle demiştir: “Bu işe öyle meşakkatlerle karşılaştım ki yolum uzadı, emeklerimin rüzgârın savurduğu şeyler gibi heba olmasından, çalışmalarımın gündüzün geceyi silmesi gibi silinmesinden korkarım.”
Cezeri’nin emeklerinin zayi olmadığının en güzel ispatı Türkiye’nin ilk uçan otomobiline Selçuk Bayraktar tarafından onun isminin verilmesiydi.
Cezeri’yi önemli kılan, icat ettiği mekanik aletlerin bilgisinin günümüze kadar ulaşmış olmasıdır.
İslam bilim tarihinin en büyük araştırmacısı olarak kabul edilen merhum Prof. Dr. Fuat Sezgin “Olağanüstü Mekanik Araçların Bilgisi Hakkında Kitap” hakkında şunları söylemekte:
“İbn er-Rezzāz el-Cezerī tarafından Āmid [Diyarbakır] prensi Nāṣireddīn Maḥmūd b. Muḥammed b. Ḳarāʾarslan’ın isteği üzerine yazılmaya başlanan ve onun sultan oluşundan iki yıl sonra tamamlanan kitaptır.
Birçok nüshalarla ve renkli resimlerle donatılmış olarak günümüze ulaşan bu eser, mekanik alanında yazmalarına kavuştuğumuz kitapların kuşkusuz en güzelidir. ‘Ekinoksal ve temporal [gece ve gündüz eşitliği ve gün uzunlukları esaslarına göre yapılan] saatler’ ve ‘cisimleri doğal konumlarından başka cisimler aracılığıyla hareket ettiren makineler’ yazarın kitabında ele aldığı konulardan bazılarıdır.”
Bu ictların içerisinde en popüler olanı hiç şüphesiz “Filli Su Saati” isimli çalışmasıydı.

Cezeri, söz konusu kitapta, bu icadını şöyle tanımlıyor:
Her şeyin günün başlangıcında düzenli olarak ayarlandığını söyleriz. Delikler halkanın siyah yarısı ile kapalı, kâtibin kaleminin ucu derece işaretlerinin dışındadır. Kalemin ucu, günün bir eşit saatinin 15 derecesinden bir derecesinin karşısına gelinceye kadar düzenli olarak sola hareket eder. Kalem, 7 1 / 2 dereceye gelinceye, yani yarım saatlik süre tamamlanıncaya kadar bu hareketi sürdürür.
Sonra, küçük kubbe üzerindeki kuş öter ve döner, deliklerden birinin yarısı beyaza döner, balkonda oturan adam sağ tarafındaki şahinin gagasından elini kaldırır, sol dizi üzerine yer değiştirir ve sol elini sol tarafındaki şahinin gagası üstüne koyar. Sağ tarafındaki şahinin gagasından sağ tarafındaki yılanın ağzına bir top düşer, yılan topun ağırlığı ile başı filin sağ omuzu üzerindeki vazoya ulaşıncaya kadar yavaş yavaş alçalır. Topu vazoya bırakır ve sonra eski yerine yükselir.
Fil seyisi, daha önce kaldırdığı balta ile filin başına bir hamlede bulunur, sopalı sol elini ise kaldırır ve filin başına vurur. Sağ eli eski yerine kalkar ve orada kalır. Top filin göğsünden çıkar ve karnında asılı bir çan üzerine duyulur bir gürültü ile düşer ve filin ayakları arasında, gövdesine doğru eğilmiş, dibi düz bir kabın içine yuvarlanır. Kâtip süratle sağa geri döner ve kaleminin ucu yine rakamların dışına gelir.
Merhum Prof. Dr. Sezgin, “İslam’da Bilim ve Teknik” isimli kitabında, bu aletin çalışma sistemi ve sonraları meydana getirdiği etki hakkında şunları kaydetmektedir:
48 entervali 30 dakikalık aralıkta sinyalle bildiren ve böylelikle 24 simetrik saati gösteren bir su saatidir. (Gösterim için vakit aralığı rekonstrüksiyonda yaklaşık 3 dakikaya indirgenmiştir.) Bir ‘katip’ filin sırtında oturarak bu aralıkları, yazı kamışını her yarım saatten sonra gizlice bir taksimat çizgisine kaydırarak göstermektedir.
Ayrıca saat yarım ve tam saatleri, kuledeki bir figürün her tam saatte sağ kolunu, her yarım saatte ise sol kolunu kaldırması suretiyle göstermektedir. Mekanizma, her 30 dakikada bir, filin gövdesinde su dolu bir tekne üzerinde hareket ettirici yarım küre şeklindeki şamandra vasıtasıyla işler. Şamandra alt tarafın da tam tamına hesaplanmış bir deliğe sahiptir. Bu delikten 30 dakikada, şamandranın artık hiç yukarı kalkmayacak ve aşağı batacağı kadar su dolar.
Bu esnada bir ip üzerinden kuledeki bir küre serbest bırakılır ve aşağı inerken birçok figürü hareket ettirir. Bir kuş döner, kuledeki insan figürü dönüşümlü olarak kollarını kaldırır, iki yılan aşağı doğru hareket eder ve şamandrayı tekrar asıl konumuna çeker.
Katip hareket eder ve filin başında oturan figür sağ elindeki bir kırbaç ile file ve sol elindekiyle trompete vurur1. Bu fil saati 16’ncı ve 17’nci yüzyılda Avrupa’da figürlü saat yapımcılarının zihnini harekete geçirmiş görünüyor. Günümüzde birçok fil saati bilinmektedir. Bunlardan birisi erken 17. yüzyıldandır ve Bayerisches Nationalmuseum’da, Münih’de bulunmaktadır.
Filli Su Saati’nin popülerliği bir kenara bırakıldığında Cezeri’nin mimari ve tıp gibi birçok alanda önemli buluşlar yaptığına şahit oluyoruz.
Örneğin “İki Kâtipli Kan Alma Teknesi” gibi icatları ile yalnızca yeni kan alma teknikleri geliştirmiyor, ayrıca alınacak kanın miktarını kesin hatlarla belirleyen bir sistem geliştirerek aşırı kan kaybı gibi problemlerin önüne geçiyordu. Bu, sağlık alanında büyük bir devrimdi ve Cezeri bu icadını şöyle anlatıyordu:

Bu, bir kaide üzerine yerleştirilmiş bir teknedir. Teknenin tabanında dört sütun ve sütunlar üzerinde iki kâtibin oturduğu bir platform vardır. Kâtiplerden biri, 1’den 120 ye kadar numaralandırılmış bir daire içinde oturmaktadır. Bu kâtip, ucu ilk numaranın dışında olan bir kalem tutmaktadır.
Diğer kâtip ise platformun köşesine oturmuştur. Sol gömlek kolu içinde, üzerinde bir tek işaretin göründüğü bir levhanın ucu görülmektedir. Sağ elinde ucu levhadaki ilk numarayı işaret eden bir kalem tutmaktadır. Tekne kanı alınacak kişinin önüne konur. Kâtiplerin yüzü hastaya doğrudur.
Yaklaşık iki dirhem su teknenin dibine boşaltılır. Bir dirhemlik kan tekneye döküldüğünde birinci kâtibin kalemi ilk numaranın üzerine gelir. Dirhem yazılmış olan ilk işaretin karşısına gelinceye kadar levha da ikinci kâtibin gömlek kolundan yükselir.
İlk kâtibin kaleminin ucu 10 dirhem işaretinin karşısına gelinceye ve tahta ikinci kâtibin gömlek kolundan yükselinceye ve ikinci kâtibin kaleminin ucu 10 dirhem işaretinin karşısına ulaşıncaya kadar bu şekilde devam eder.
Bu, 120 dirhem (yaklaşık 348 gram) kan ya da istenirse daha azı teknede toplanıncaya kadar sürer. Sonra tekne kaldırılır. İçindeki kan ile birlikte kap başka yere götürülür. İçindekiler boşaltılır ve yıkanır ve tekneyle birlikte kap yerine geri konur.

Cezeri; şifreli kasalar, otomatik ibrikler, çeşitli kan alma teknikleri ve yeni saat teknikleri başta olmak üzere pek çok esere imza atmıştı.
Sibernetik Mantığı
Sibernetik mantığı için mekanizmaların dış dünyanın gereksinimlerine göre kendinin yenileyip düzenleyebilen öz denetimli sistemler oluşturmak üzerine oturtulmuştur, denebilir. Sibernetik mantığı, basit bir geri bildirim döngüsü sayesinde sistemlere öz denetim (kendi kendine hareket etme özelliği) kazandırmaktadır. Sibernetik, eylemin çerçevesinde yol açtığı değişimlerin, sistem içinde geribildirim yolu ile yansıtıldığı, kapalı sinyal döngüsü şeklinde ifade edilen sistemlere uygulanan bir yaklaşımdır. Sibernetik sistemlerin geri bildirimler sayesinde değişime uğraması, “dairesel nedensellik” ilişkisi olarak tanımlanır.
Sibernetik için diğer bilim dallarının arasında mantık ve matamatik gibi bir köprü vazifesi gördüğü söylenebilir.

Sibernetik sistemler, yapay olabildikleri gibi biyolojik de olabilirler.Biyolojik sibernetik sistemlerin mantığı için insan vücudu en iyi örnektir. Vücut içi sıcaklığımızı düzenleme yolu, şekerli yiyecekler yediğimizde insülin salgılanmasındaki artış gibi geri bildirimler biyolojik sibernetik sistemlerin mantığını açıklamaya yardımcı örneklerdendir.

Kendi kendini yönetebilen yapay sistemler ise bu öz denetimi genellikle bilgisayar çipleriyle gerçekleştirir. Bu sistemler bir dizi elektronik alıcı vasıtasıyla dış dünya hakkında bilgi toplar. Otokontrol, otobakım ve bilgi aktarımı üzerine kurulu bu sistemlerin işleyişlerini, istenilen düzeyde ve değerlerde yürütebilmesi için bu şarttır. Dış dünya ile sistem arasındaki ilişkiye dair toplanan bilgiler, çipler tarafından işlenir. Ve bu sayede sistemler için gerekli öz düzenleyici sinyaller verilir.

Teknoloji ile birlikte sibernetik bilimi, endüstriyel alanda bir yönetim sanatına dönüşmüştür. Çünkü günümüzde fabrikalar ve imalat işlemleri sibernetik araçlarla idare edilmektedir. Gelişen teknoloji ve paralelinde ilerleyen makineleşme nedeniyle gelecekte de sibernetik sistemlere duyulan ihtiyacın her geçen gün artması kaçınılmazdır.
Günümüzde ev, fabrika gibi alanlarda kullanılan ısıdenetirler-Termostatlar, bu sistemlere verilebilecek en temel örneklerden biridir. Bu aygıtın sistemi; bir yerin veya bir nesnenin ısısının önceden belirlenen düzeyde olmasını insani müdahaleye gerek kalmadan, negatif geri bildirim halkası içinde otomatik olarak ayarlar. Özetle sibernetik, bir hedefe sahip olmak ve bu hedefe ulaşmak için harekete geçmekle ilgilidir. Hedefinize ulaşıp ulaşmadığınızı veya en azından ona yaklaşıp yaklaşmadığınızı bilmek, sibernetik tekelindeki kavram olan geri bildirim sayesindedir.

Sibernetik ve Kullanım Alanları
Sibernetik biliminin; verimlilik, kavramlar arası öğrenme, tesir ve sosyal kontrol gibi konuları ele alması birçok sektörde önemli bir yer kazanmasını sağlamıştır. Sibernetik nerelerde kullanılır, derseniz; son yıllarda artan teknolojik gelişmelerle bu bilim hayatın birçok noktasında karşımıza çıkmaya başlamıştır.
Özellikle savunma sanayi, fabrika otomasyonları, imalat işlemlerinde verimlilik, endüstri robotlarında ve uzay araçlarının rota işlemleri gibi sektörlerde yerini almış ve vazgeçilmez olmaya başlamıştır. Ayrıca oyun teorisi, sistem teorisi, algısal kontrol, felsefe, mimarlık vb. birçok çalışma alanları sibernetikten doğrudan ya da dolaylı yoldan etkilenmiştir.

Gelişen teknolojinin beraberinde getirdiği makineleşme ile sibernetik sistemlere duyulan ihtiyaç her geçen gün artmaktadır. Günümüzde fabrikalar ve imalat işlemleri sibernetik araçlarla idare edilmektedir. Bu sistemlere temel bir örnek evler, fabrikalar vs gibi yerlerde kullanılan termostat-ısıdentirlerdir. Bu aygıt, bir yerin veya bir nesnenin ısısının önceden belirlenen düzeyde olmasını insani müdaheleye gerek kalmadan, negatif geri bildirim halkası içinde otomatik olarak ayarlar.

- KIRMIZI kablo 230V AC şebekeden FAZ hattına bağlanır. Faz hattı elektriğin şebekeden kullanıcıya geldiği hattır.
- SİYAH kablo 230V AC şebekeden NÖTR hattına bağlanır. Nötr hattı elektriğin tekrar şebekeye döndüğü hattır.
- Vananın açılıp kapanması için YEŞİL ve SARI kablolar arasında anahtarlama yapılır. Yani sadece bu iki kablo
arasında iletim sağlanmalı ya da kesilmelidir. Bunun için Şekil deki örnekte olduğu gibi termostatın kontakları
kullanılabilir. SARI kablo termostatın C (COM-Ortak) ucuna bağlanır. Termostatın ayarlandığı sıcaklıkta vananın
açması, diğer durumlarda vananın kapalı kalması isteniyorsa YEŞİL kablo, termostatın NO (Normalde Açık)
kontağına bağlanır. Ya da termostatın ayarlandığı sıcaklıkta vananın kapanması, diğer durumlarda açık kalması
isteniyorsa YEŞİL kablo NC (Normalde Kapalı) kontağına bağlanır
Endüstriyel robotlardaki geri bildirim halkaları, uzay araçlarındaki rota çizimleri gibi pek çok alanda sibernetik sistem mevcuttur.
{kind=link}
Endüstriyel Robotlarda Gelişim Süreci
Endüstriyel robotların tarihi, 1950 yıllarında başlar ve günümüzde bu konudaki gelişme hızla devam etmektedir. 1954 yılında George Devol, kendi geliştirdiği ve “Programlanan Nesne Transferi” adını verdiği icadı için patent başvurusunda bulunur. Patent aldıktan sonra Columbia Üniversitesi mezunu girişimci bir mühendis olan Joseph Engelberger ile birlikte Unimation adında bir firma kurarak ürün adını Robot olarak değiştirirler. İlk endüstriyek robot, Unimate modelini üretmeye başlarlar. İlk Unimate hidrolik güç mekanizmasına sahiptir. Sayısal kontrol, manyetik davul bellekli, ayrık katı hal (elektronik) kontrol bileşenleri kullanılmıştır. İlk Unimate 1961 yılında General Motors fabrikasında, sıcak kalıp döküm makinesine yardımcı olarak kullanılır. Unimation firması, kısa zaman içinde kaynak vb işleri yapan robotlar geliştirir.
1958 yılında Jack Kilby, Texas Instruments şirketinin laboratuvarında ilk yapay zeka ile ilgili entegre devreyi üretir. Bu, endüstride bir devrin başlangıcıdır. Günümüzde, tırnak büyüklüğünde bir alana milyonlarca devre elemanı sığmaktadır. Entegre devrenin bulunuşu robotik alanındaki ilerlemeyi kat kat arttırmıştır.
1960 yılında Harry Johnson ve Veljko Milenkovic, Versatran (VERSAT ile TRANsfer) adını verdikleri, programlanabilir robotu üretirler. Versatran’ın sürekli yörüngede çalışan modeli olduğu gibi noktadan noktaya çalışanı da vardır. 1972 yılında Silent Running adlı filmde de yer almıştır. 1967 yılında, Japonya tarafından ilk ithal edilen robot Versatran olmuştur.
1967 yılında Ralph Mosher, Walking Truck (yürüyen kamyon) adını verdiği dört ayaklı robotu General Electric firmasında tasarlar. Robotun içinde sürücüsü vardır, zorlu yollar için tasarlanmıştır. Sürücü kamyonun içinde yürüdükçe, kamyon da arazide yürür. 250 kg kadar yük taşımakta, saatte 24 km kadar hız yapabilmektedir.
Endüstriyel robotların tarihi, 1950 yıllarında başlar ve günümüzde bu konudaki gelişme hızla devam etmektedir. 1954 yılında George Devol, kendi geliştirdiği ve “Programlanan Nesne Transferi” adını verdiği icadı için patent başvurusunda bulunur. Patent aldıktan sonra Columbia Üniversitesi mezunu girişimci bir mühendis olan Joseph Engelberger ile birlikte Unimation adında bir firma kurarak ürün adını Robot olarak değiştirirler. İlk endüstriyek robot, Unimate modelini üretmeye başlarlar. İlk Unimate hidrolik güç mekanizmasına sahiptir. Sayısal kontrol, manyetik davul bellekli, ayrık katı hal (elektronik) kontrol bileşenleri kullanılmıştır. İlk Unimate 1961 yılında General Motors fabrikasında, sıcak kalıp döküm makinesine yardımcı olarak kullanılır. Unimation firması, kısa zaman içinde kaynak vb işleri yapan robotlar geliştirir.
1958 yılında Jack Kilby, Texas Instruments şirketinin laboratuvarında ilk yapay zeka ile ilgili entegre devreyi üretir. Bu, endüstride bir devrin başlangıcıdır. Günümüzde, tırnak büyüklüğünde bir alana milyonlarca devre elemanı sığmaktadır. Entegre devrenin bulunuşu robotik alanındaki ilerlemeyi kat kat arttırmıştır.
1960 yılında Harry Johnson ve Veljko Milenkovic, Versatran (VERSAtile TRANsfer) adını verdikleri, programlanabilir robotu üretirler. Versatran’ın sürekli yörüngede çalışan modeli olduğu gibi noktadan noktaya çalışanı da vardır. 1972 yılında Silent Running adlı filmde de yer almıştır. 1967 yılında, Japonya tarafından ilk ithal edilen robot Versatran olmuştur.
1967 yılında Ralph Mosher, Walking Truck (yürüyen kamyon) adını verdiği dört ayaklı robotu General Electric firmasında tasarlar. Robotun içinde sürücüsü vardır, zorlu yollar için tasarlanmıştır. Sürücü kamyonun içinde yürüdükçe, kamyon da arazide yürür. 250 kg kadar yük taşımakta, saatte 24 km kadar hız yapabilmektedir.

1968 yılında Unimation, kendi teknolojisinin lisansını Japonya’da Kawasaki Ağır Sanayi şirketine satar. Bundan sonra Japon robot endüstrisinde patlama yaşanır. 1990’a gelindiğinde, Japonya robot sektörünün öncüsüdür.
1966-1972 yılları arasında, Stanford Üniversitesi’nde bulunan Yapay Zeka Merkezi’nde Charles Rosen’ın ekibi Shakey adlı robotu geliştirir. Shakey, ilk mobil robottur.
Engellerin etrafından dolaşmakta, nesnelerin yerini değiştirmek gibi basit işleri yapabilmektedir. Shakey kendi kararlarını kendisi veren, otonom bir robottur.
1969 yılında Vic Scheinman, Stanford Üniversitesi’ndeki yüksek lisans öğrenimi sırasında, tamamı elektrikle çalışan, altı eksenli, eklemli Stanford kolu geliştirir. Endüstriyel robotların daha karmaşık işlerde kullanılmasını sağlayan bu kol, ileride geliştirilerek montaj için programlanabilir evrensel makine adını alır.
1971 yılında Richard Hohn, Cincinnati Milacron firmasında T3 (The Tomorrow Tool, yarının aleti) isimli ilk mikroişlemci kontrollü endüstriyel robotu üretir.
1972 yılında Shigeo Hirose, ilk yılansı robotu yapar. Hirose’nin geliştirdiği robotlar yürür, sürünür, yüzer ve tırmanır. Yedi tonluk ninja robotu, toprak kaymasını önlemek için dağlara tırmanarak civata takmaktadır. Hirose, Birleşmiş Milletler için uzaktan kumandalı kara mayını temizleyen robot projesinde de yer almaktadır.
1973’te Ichiro Kato, Tokyo Üniversitesi’nde insan boyundaki ilk insansı robot olan Wabot-1‘i yapar. Wabot-1, hareket kontrol sistemi, görme sistemi ve konuşma sisteminden oluşmaktadır. Japonca konuşabilmekte ve nesnelere olan uzaklıkları ölçebilmektedir. Yürüyebilmekte, dokunma sensörü bulunan elleriyle nesneleri kavrayıp taşıyabilmektedir. Wabot-1’in zihinsel yaşının 1.5 yaşındaki bir bebeğe eşdeğer olduğu tahmin edilmektedir.
1973’te Ichiro Kato, Tokyo Üniversitesi’nde insan boyundaki ilk insansı robot olan Wabot-1‘i yapar. Wabot-1, hareket kontrol sistemi, görme sistemi ve konuşma sisteminden oluşmaktadır. Japonca konuşabilmekte ve nesnelere olan uzaklıkları ölçebilmektedir. Yürüyebilmekte, dokunma sensörü bulunan elleriyle nesneleri kavrayıp taşıyabilmektedir. Wabot-1’in zihinsel yaşının 1.5 yaşındaki bir bebeğe eşdeğer olduğu tahmin edilmektedir.

1977 yılında çevrilen Star Wars (Yıldız Savaşları) filminin androidi C3PO ve mobil robotu R2D2’nun yarattığı yankı sonucunda 1980’lerde Japonya’da benzerleri evleri süpürür, şarkılar söyler olmuşlardır.
1979 yılında, Hiroshi Makino’nun ekibi tarafından Yamanashi Üniversitesi’nde Scara robot kolu tasarlanır. Bu kol, montaj endüstrisinde yepyeni bir soluk olur. Tekrarlı montajları son derece hızlı ve hatasız yapabilmektedir.
1983 yılında Steve Bartholet tarafından Odetics firmasında tasarlanan altı ayaklı, 136 kg ağırlığında, üzerindeki bilgisayar uzaktan da kontrol edilebilen ve kendi gücüyle hareket eden Odex 1 robotu tanıtılır. Robot, kendi boyunu istediği şekilde uzatıp kısaltma, dar yerlerden geçerken incelme özelliğine sahiptir. Her bacak 180 kg kaldırabilmekte, normal yürüme hızında toplam 400 kg yük taşıyabilmektedir.
1984 yılında Joseph Engelberger, hastane robotları üretmek için HelpMate isimli firmayı kurar ve ilk HelpMate robotu 1988’de Connecticut’taki Danbury Hastanesi’ne yollanır.
1985 yılındaYik San Kwoh, California’daki Long Beach Memorial Medical Center’da bilgisayarlı bir robot kolu, beyin ameliyatında yardımcı olarak kullanır. Robot kol, biyopsi iğnesi ve ameliyat matkabını kullanmak konusunda yardımcı olur. Robot kolun hassasiyetle iş yapabilmesi, genel anestezi gereğini ortadan kaldırıp, beyindeki travmayı azaltarak, hastanın ameliyatın ertesi gün evine dönebilmesine olanak sağlamıştır. Klasik yöntemlerle yapılan ameliyatlarda, ameliyattan sonra hastanede bir hafta, bazen daha da uzun süre kalmak gerekmektedir.
1986 yılında Honda firması, gizli bir insansı robot projesi başlatır. 1996’da P2 robotu tanıtılır. Bu çalışmalar sonunda dünyaca ünlü Asimo’nun üretimine kadar ilerler. Asimo, 2000’de halka tanıtılır. 130 cm boyunda, 48 kg ağırlığında, saatte 6 km hızla koşabilen bir robottur. Asimo, görme, konuşma, ses tanıma gibi pek çok özellikleri dolayısıyla, insanlarla iletişim kurabilen bir robottur.
1990 yılında William Bargar ve Howard Paul, tasarladıkları Robodoc isimli robotla bir köpeğin kalça kemiğini değiştirirler. Aynı ameliyatı 1992’de insan üzerinde gerçekleştirirler.
1993 yılında Rodney A. Brooks, MIT (Massachusetts Institue of Technology)’de Cog adını verdiği robotu üretir. Cog, diğer robotlardan farklıdır, insan davranışlarına ve tavırlarına yakınlık hedeflenmiştir. Cog, insan gibi eğitilen ve yetiştirilen, insanlarla olan etkileşiminden öğrenen bir robottur.
1994 yılında Carnegie Mellon Üniversitesi’nin robotu Dante II, Alaska’daki aktif bir volkanı keşfe çıkar, volkanik gaz örnekleri toplar. 1993’te bu işi yapmaya çalışan sekiz bilim insanı iki ayrı volkanda hayatlarını kaybetmişlerdir. Robotların devreye girmesiyle, zorlu arazilerde uzaktan araştırma ve keşif yapmak kolaylaşmaktadır.
1997 yılında Nasa’nın projesi olan Mars Pathfinder’ın bir parçası, Sojourner rover (gezginci), kendisinden beklenenin 12 katını gerçekleştirerek, uzun bir süre çalışır ve Pathfinder’a en uygun rotayı planlayarak yardımcı olur. Ayrıca 550 görüntü alarak Mars’ın o andaki ve geçmişteki durumu hakkında bilgi edinilmesini sağlar.
1997 yılında her yıl robotik ve yapay zekanın sınandığı platform haline gelecek olan RoboCup futbol turnuvası Nagoya, Japonya’da başlar.
2001 yılında, Canadian Space Agency (Kanada Uzay Kurumu) tarafından, Canadarm2 adlı robot kol, International Space Station (uluslar arası uzay istasyonu) ile birlikte dünyanın yörüngesine ve yerden 70 km yükseğe yerleştirilir. Canadarm2, 1641 kg ağırlığında ve 17 m uzunluğundadır, 19 kat karbon fiber termoplastikten üretilmiştir. Yapısı insan koluna benzemektedir. Görevi, uzay istasyonunda gerekli onarımlara yardım etmek ve kumandasız kargo gemilerini, hatta astronotları yakalamak ve istasyona çekmektir. Bu görevi başarıyla yerine getirmiştir. On yıl içinde 2.4 milyar km yol kat etmiştir. Bu mesafe, Güneş ile Satürn arasındaki mesafenin 1.5 katıdır.
2001 yılında insansız hava aracı olan Global Hawk, 22 saat aralıksız uçar, bu uçuş sırasında Pasifik Okyanusu’nu da geçer. Global Hawk ilk uçuşunu 1998 yılında gerçekleştirmiştir. Afganistan ve Irak savaşlarında kullanılmıştır.
2001 yılında Dünya Ticaret Merkezi saldırısında robotlar kurtarma çalışmalarında kullanılırlar.
2002 yılında elektrikli süpürge robotu Roomba, iRobot firması tarafından piyasaya sürülür. Roomba, günümüze dek milyonlarca eve ulaşmıştır.
2003 yılında ikiz araçlar Spirit ve Opportunity, Mars yüzeyini ve jeolojisini incelemek, bilgi toplamak ve elde ettikleri bilgileri iletmek üzere Mars’a gönderilirler. Çalışmaya 2004’te başlarlar. Spirit 2009’da takılır ve iletişimi keser. Opportunity ise hala çalışmakta ve dünyaya bilgi göndermektedir. Planlanandan (90 gün) çok daha uzun süre dayanmışlardır. Mars dışından gelen meteor kalıntılarını ve Victoria kraterini araştırmak görevleri arasındadır.
2005 yılında Cornell Üniversitesi’nin tasarladığı robot, kendi kendinin kopyasını üretir. Robotun tasarımı basittir ve sonuçlar da tartışmalıdır, ancak konunun gündeme gelmesi açısından önem taşımaktadır. Robotu oluşturan her bir plastik küpte mikroişlemci, motor ve elektromıknatıs bulunmaktadır. Küpler, köşegenden ikiye bölünür.
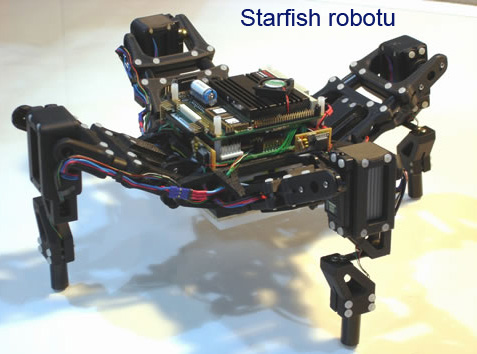
2006 yılında Cornell Üniversitesi araştırmacıları, deniz yıldızından esinlenerek tasarladıkları Starfish adlı robotu tanıtırlar. Starfish, önce düz bir yüzeyde yürüyüp, algılayıcılarıyla kendi hareketlerini algılamakta, elde ettiği bilgiyle kendini modellemektedir. Her hareketinde, kendi hakkındaki bilgiyi güncellemekte ve elde ettiği modeli gelecekteki hareketlerinde kullanmaktadır. Bacaklarından birisi arızalandığında, yürüyüşünü yeni duruma uyum sağlayacak şekilde değiştirmekte, dolayısıyla yaralanmaya karşı strateji geliştirmektedir.
{kind=link}

2007 yılında TOMY firması, eğlence robotu olan i-Sobot’u üretir. 16.5 cm yüksekliğindeki robot, dünyanın en küçük, seri üretilen, insansı robotudur.
2010 yılında Ekso firması, giyilebilir biyonik robot iskeleti üretir. Giysi, rehabilitasyon dönemindeki hastalara, yürümeyi yeniden öğretmek amacını taşımaktadır.
2011 yılında NASA, uzaya ilk insansı robotu, Robonaut 2’yi gönderir. Görevi, astronotlara işlerinde yardım etmek ve uzay istasyonun tamiratı ve bakımı ile ilgili işleri yapmaktır.

Endüstriyel Robot ve İnsansı Robot geliştitme çalışmaları halen devam etmektedir.
Google’den derleme
A.K